АВТОМАТОВ СПОСОБЫ ЗАДАНИЯ
Расстановка ударений: АВТОМА`ТОВ СПО`СОБЫ ЗАДА`НИЯ
АВТОМАТОВ СПОСОБЫ ЗАДАНИЯ - варианты описания автоматов, их функционирования или поведения. А. с. з. зависят от подхода к определению понятия автомата. При макроподходе (см. Автомат конечный) описывается внешнее поведение автомата; при микроподходе задание должно содержать описание элементов, из к-рых строится автомат, и схемы их соединения. Ниже приводятся способы задания конечных автоматов.
Макроподход. В этом случае задать конечный автомат  = (A, S, В, φ, ψ) при условии, что заданы алфавиты А = {a1, ..., am}, S = {s1, ..., sn}, В = {b1, ..., bk}, - значит описать функции φ и ψ или описать поведение этого автомата (см. Автомата поведение). Для задания функций φ и ψ обычно используют таблицу переходов, диаграмму переходов или матрицу переходов. Таблица переходов Т автомата состоит из двух подтаблиц Tφ = ||
= (A, S, В, φ, ψ) при условии, что заданы алфавиты А = {a1, ..., am}, S = {s1, ..., sn}, В = {b1, ..., bk}, - значит описать функции φ и ψ или описать поведение этого автомата (см. Автомата поведение). Для задания функций φ и ψ обычно используют таблицу переходов, диаграмму переходов или матрицу переходов. Таблица переходов Т автомата состоит из двух подтаблиц Tφ = || || и Tψ = ||
|| и Tψ = || ||, i = 1, ..., n, j = 1, ..., m, ∈ S, ∈ B. Функции φ и ψ определяются как φ (si, aj) = , ψ (si, aj) = . Если все столбцы Tψ совпадают, то таблица Т задает автомат Мура. Напр., пусть A0 = {а1, а2}, S0 = {s1, s2}, B0 = {b1, b2}; тогда таблица Т (рис. 1) задает функции φ0 и ψ0 нек-рого автомата 0 (на рис. 2 показаны подтаблицы Tφ и Tψ таблицы Т).
||, i = 1, ..., n, j = 1, ..., m, ∈ S, ∈ B. Функции φ и ψ определяются как φ (si, aj) = , ψ (si, aj) = . Если все столбцы Tψ совпадают, то таблица Т задает автомат Мура. Напр., пусть A0 = {а1, а2}, S0 = {s1, s2}, B0 = {b1, b2}; тогда таблица Т (рис. 1) задает функции φ0 и ψ0 нек-рого автомата 0 (на рис. 2 показаны подтаблицы Tφ и Tψ таблицы Т).
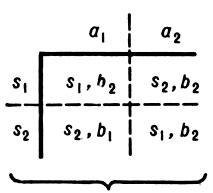
Рис. 1
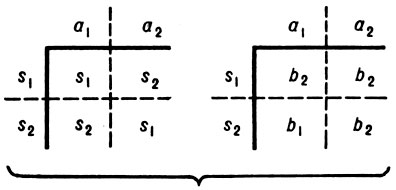
Рис. 2
Диаграмма автомата (диаграмма переходов автомата) - это ориентированный граф G, вершинам к-рого взаимно однозначно соответствуют элементы S, а ребрам приписаны нек-рые множества пар вида (а, b), а ∈ А, b ∈ В. Из каждой вершины G исходит по крайней мере одно ребро; при этом множество  всех пар, приписанных ребрам, исходящим из одной вершины, имеет вид = {(a1, bi1), (a2, bi2), ..., (am, bim)}. Функции φ и ψ определяются следующим образом: φ (si, aj = sr, ψ (si, aj) = bp, если ребру, исходящему из вершины si, приписана пара ai, bp) и это ребро ведет в вершину sr . Нек-рые свойства автоматов удобно формулировать на языке диаграмм (связность автомата, достижимость состояний и т. п.). На рис. 3 представлена диаграмма переходов автомата 0 .
всех пар, приписанных ребрам, исходящим из одной вершины, имеет вид = {(a1, bi1), (a2, bi2), ..., (am, bim)}. Функции φ и ψ определяются следующим образом: φ (si, aj = sr, ψ (si, aj) = bp, если ребру, исходящему из вершины si, приписана пара ai, bp) и это ребро ведет в вершину sr . Нек-рые свойства автоматов удобно формулировать на языке диаграмм (связность автомата, достижимость состояний и т. п.). На рис. 3 представлена диаграмма переходов автомата 0 .
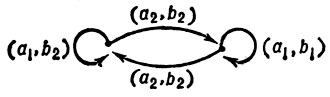
Рис. 3
Матрица переходов используется для описания функционирования переходной системы 〈 A, S, φ 〉 (см. Автомат конечный). Она представляет собой (n × n) - матрицу P = ||Pij ||, элементами к-рой являются подмножества алфавита А (может быть, пустые) такие, что а ∈ Рij тогда и только тогда, когда φ (si, a) = sj и, следовательно, для всякого i = 1, 2, ..., n имеет место Pip ∩ Pir = ∅ при р ≠ r и ∩nj = 1 Pij = A. Чтобы распространить функцию φ на множество S × A* (А* - множество всех слов в алфавите А, включая пустое слово), рассматривают последовательность степеней матрицы Р. Умножение матрицы Р на себя производится по обычному алгоритму с использованием вместо операций умножения и сложения операций произведения (конкатенации) и объединения множеств слов. Если α ∈ А* - слово длины d и α ∈ Pij(d) где Pij(d) - элемент матрицы Pd, то φ (si, α) = sj . Так, матрица переходов Р переходной системы 〈 А0, S0, φ0 〉 и матрица Р2 имеют, соответственно, вид:

С указанными А. с. з. связан ряд алгоритмов минимизации (приведения) и синтеза автоматов.
Для задания поведения инициального (не обязательно конечного) автомата S1 (преобразователя) необходимо описать функцию f(α) = ψ (s1, α), отображающую А* в В* (или А∞ в В∞, где A∞, В∞ - множества всех сверхслов в алфавитах А и В, соответственно). Эта функция может быть задана информационным деревом. Из каждой вершины информационного дерева исходит т ребер, взаимно однозначно соответствующих буквам алфавита А. Каждой вершине приписано состояние автомата S1, а каждому ребру - буква алфавита В следующим образом. Корню приписано состояние s1 . Если нек-рой вершине приписано состояние si, то ребру, соответствующему букве а из А, приписана буква b = ψ (si, а) и вершине, в к-рую ведет это ребро, приписано состояние sj = φ (si, а). Каждому слову α = α1 α2 ...αr ∈ А* соответствует единственная последовательность ρ = ρ1 ρ2 ...ρr ребер этого дерева такая, что ρ1 исходит из корня и ρi + 1 исходит из вершины, в к-рую ведет ρi . Слово β = β1 β2 ...βr, где βi - буква из В, приписанная ребру ρi, i = 1, ..., r, совпадает со значением  (s1, а). Если функция f реализуется конечным автоматом, то соответствующее информационное дерево может быть задано эффективно своим конечным поддеревом. На рис. 4 изображено поддерево информационного дерева, задающее поведение инициального автомата 0S1 (левые ребра, исходящие из вершин, соответствуют символу a1 правые - символу а2).
(s1, а). Если функция f реализуется конечным автоматом, то соответствующее информационное дерево может быть задано эффективно своим конечным поддеревом. На рис. 4 изображено поддерево информационного дерева, задающее поведение инициального автомата 0S1 (левые ребра, исходящие из вершин, соответствуют символу a1 правые - символу а2).
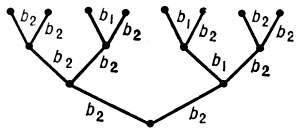
Рис. 4
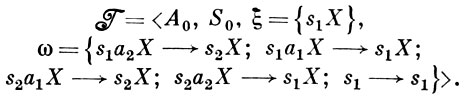
Описание поведения конечного автомата (акцептора) в терминах представимого события (сверхсобытия) может быть сделано с помощью регулярного выражения (см. Регулярное событие). Такие события могут быть также заданы как множества слов, порождаемых (выводимых) в нек-рой формальной системе (полу-Туэ грамматике и т. п.). Система полу-Туэ в этом случае задается четверкой Т = (A, S, ξ, ω), где A, S - конечные алфавиты, A ∩ S = ∅, ξ - аксиом схема вида s0 X и ω - множество схем правил вывода вида saX → s'X, r → r, где s, s', r ∈ S, а ∈ А и X - переменная, принимающая значения из А* . При этом, если saX → s'X и saX → s''X принадлежат ω, то s' = s''. Слово α ∈ А* выводимо в системе Т, если существует последовательность слов s0 α = w1, w2, ..., wn такая, что wi + 1 получается из wi, i = 1, ..., n - 1, применением нек-рого правила из ω, wn ∈ S и ω не содержит правила wn → wn . Аналогичный вид имеет грамматика, порождающая регулярное событие. Она задается четверкой Г = (А, S, s1, ω), где s1 из S - аксиома, ω - множество правил вида si → asj, либо si → а. Слово α = α1 α2 ...αn выводимо в Г, если в ω имеются правила s1 → α1 si2, si2 → α2 si3, ..., sin → αn . Известны алгоритмы, позволяющие получать матрицу переходов автомата по формальным системам описанного типа. Так, событие, представимое в акцепторе 〈 А0, S0, φ0, s1 〉 состоянием s2, может быть, напр., задано как множество слов, выводимых в системе полу-Туэ, к-рая имеет вид:
Существует ряд других А. с. з. Напр., переходная система 〈 А, S, φ 〉, не обязательно конечная, может быть задана как алгебра 〈 S, Ф&$62;, где Ф = {φa |а ∈ A} есть множество унарных операций на S таких, что φa (s) = φ (а, s). Так, переходную систему 〈 А0, S0, φ0 〉 можно рассматривать как алгебру 〈 S0, {φa1, φa2} 〉, где φa1 (s1) = s1, φa1 (s2) = s2, φa2 (s2) = s1, φa1 (s1) = s1 . Можно также рассматривать алгебру 〈 S̃, Ф̃ 〉, где S̃ - множество слов вида sα, s ∈ S, α ∈ А*, и Ф̃ = {φ ̃a |a ∈ A} - множество унарных операций на S̃ таких, что φ̃a (sa) = sα a. Алгебра 〈 S̃, Ф̃ 〉 задается системой образующих S и множеством определяющих соотношений ω = {si αi = s'i α 'i, i = 1, 2...}. Такая алгебра задает автомат (вообще говоря, частичный) 〈 A, S, φ 〉 такой, что если si αi = s'i α 'i - соотношение из ω, то φ (si αi) = φ (s'i α 'i). Напр., переходную систему 〈 A0, S0, φ0 〉 можно задать системой образующих S0 и множеством определяющих соотношений ω = {s1 = s1 a1, s1 = s2 a2, s2 = s1 a2, s2 = s2 a1}. При этом предполагается, что φ (s1, Λ) = s1, φ (s2, Λ) = s2 .
Поведение автомата может быть описано средствами языка логики одноместных предикатов. При этом выбор класса формул, задающих конечные автоматы, осуществляется различными способами. Описание может быть неполным, тогда оно определяет нек-рый класс автоматов, поведение к-рых идентично с точностью до этого описания. Напр., «анкетный» подход связан с заданием класса автоматов с помощью фрагментов информационных деревьев, частичного определения функций φ и ω и т. п.
Указанные А. с. з. могут быть использованы с соответствующими модификациями при макроподходе к поведению нек-рых обобщений конечных автоматов (недетерминированных, бесконечных и т. п., см. Автомат). Так, элементами таблицы Tφ конечного недетерминированного автомата могут быть произвольные подмножества множества S. Поведение конечного недетерминированного акцептора описывается регулярным выражением, как и в детерминированном случае. Другими обобщениями конечных автоматов являются конечные автоматы вероятностные, автоматы над термами, мозаичные структуры и т. п.
Задать вероятностный автомат 〈 A, S, B, μ 〉, если известны алфавиты A = {a1, ..., am}, В = {b1, ..., bk}, S = {s1, ..., sn), - значит при любых фиксированных i и j (l ≤ : i ≤ n, 1 ≤ j ≤ m) указать условную вероятностную меру μij (sr, bq) нa множестве всех пар (sr, bq), r = 1, ..., n, q = 1, ..., к. Для этого обычно рассматривают систему квадратных матриц с неотрицательными элементами

такую, что каждая матрица 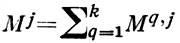 является стохастической. Мера μ определяется так: μij (sr, bq) = μi, rq, j . Вероятностный автомат 〈 A, S, B, μ 〉 рассматривается совместно с нек-рым начальным распределением вероятностей на множестве S:
является стохастической. Мера μ определяется так: μij (sr, bq) = μi, rq, j . Вероятностный автомат 〈 A, S, B, μ 〉 рассматривается совместно с нек-рым начальным распределением вероятностей на множестве S:

Иногда при задании вероятностных автоматов ограничиваются либо указанием матриц Мj, либо указанием матриц  j = ||μji, q ||, где
j = ||μji, q ||, где
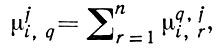
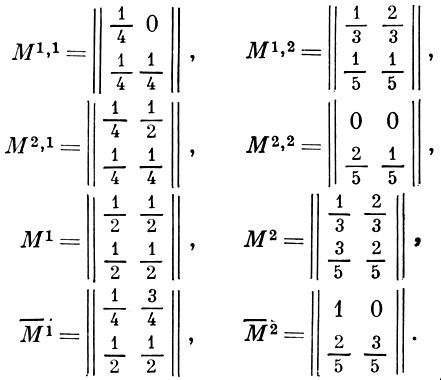
i = 1, ..., n, q = 1, ..., k, j = 1, ..., m. Любая конечная Маркова цепь может рассматриваться как конечный вероятностный автомат, у к-рого матрицы Мj, j = 1, ..., m, совпадают. Ниже представлены система матриц, задающая нек-рый вероятностный автомат (n = 2, k = 2, m = 2), и матрицы М1, М2, 1, 2 этого автомата:
Чтобы задать конечный автомат над термами 〈 A, S, σ, αa 〉, когда известны алфавиты А = {a1, ..., am}, S = {s1, ..., sn}, необходимо, во-первых, указать отображение σ множества А в конечное множество неотрицательных целых чисел, причем так, чтобы существовал хотя бы один элемент а ∈ А такой, что σ (a) = 0, а во-вторых, для всякого аi ∈ A, i = 1, ..., m, требуется определить σ (ai)-местную функцию αai, отображающую множество [S]σ (ai) = S ×... × S в S. Каждому элементу а ∈ А такому, что σ (а) = 0, ставится в соответствие элемент αa ∈ S, наз. начальным состоянием автомата. Напр., если А = {а1, а2}, S = {s1, s2}, σ (а1) = 0, σ (а2) = 2, αa1 = s1, αa2 (s1, s1) = s2, αa2 (s1, s2) = s1, αa2 (s2, s1) = s2, αa2 (s2, s2) = s2, то функции σ, αa1, αa2 задают нек-рый автомат над термами (А, S, σ, {αa1, αa2}) с начальным состоянием s1 .
Чтобы задать мозаичную структуру (бесконечное соединение переходных систем вида 〈 A, S, φ 〉, где А = Sr, см. Автомат), необходимо для каждой целочисленной точки n-мерного пространства определить конечное упорядоченное множество целочисленных точек - ее окрестность. При этом входной алфавит А переходной системы 〈 A, S, φ 〉, помещенной в нек-рую точку, есть декартово произведение множеств состояний переходных систем, помещенных в точки ее окрестности. Напр., пусть S = {s1, s2} и для всякой целочисленной точки двумерного пространства (α, β) ее окрестность Dα, β есть упорядоченное множество {(α - 1, β), (α, β + 1), (α + 1, β)} - Чтобы задать однородную двумерную мозаичную структуру, определяют функцию φ следующим образом: φ (s1, s1) = s1, φ (s', s', s''') = s2 в остальных случаях. Входной алфавит А в данном случае - декартово произведение S × S × S.
Микроподход. При микроподходе задать структурный автомат - значит описать элементы, из к-рых он построен, и схему их соединения. Описание может производиться на различных уровнях детализации. Часто ограничиваются рассмотрением так наз. канонической схемы построения автоматов; при этом элементы делят на две группы - функциональные элементы (автоматы с одним состоянием) и элементы памяти. Канонич. схема (рис. 5) состоит из двух функциональных блоков f и g с присоединенными к ним элементами памяти, в качестве к-рых используются автоматы Мура: i = 〈 Ri, Si, Qi, φi, ψi 〉 i = 1, ..., l. Блоки f и g построены из функциональных элементов. При данном способе задания структуру этих блоков не описывают, а задают (напр., таблично) реализуемые ими вектор-функции:
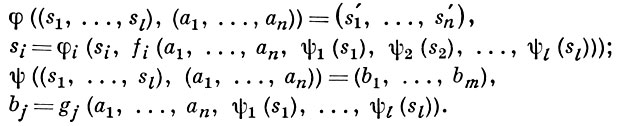
где An и Bm -, соответственно, входной и выходной алфавиты канонич. схемы. Эта схема задает структурный автомат 〈 Аn, S, Вm, φ, ψ 〉, где S = S1 ×... × Sl, а функции φ и ψ определяются следующим образом:
Важным примером структурных автоматов являются логич. сети (см. Автомат конечный). На рис. 6 представлена канонич. схема автомата 〈 А̃, S̃, В̃, φ̃, ψ̃ 〉, изоморфного автомату 0, диаграмма к-рого изображена на рис. 3, Ã = S̃ = B̃ = {0, 1}. Автомат ' = 〈 S̃, S̃, S̃, φ ', ψ ' 〉 - автомат Мура такой, что φ '(1, z) = z, φ '(0, z) = z.
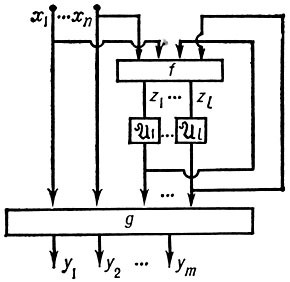
Рис. 5.
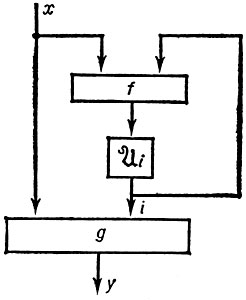
Рис. 6.
Для описания структурных автоматов часто используются канонические уравнения, т. е. системы вида:
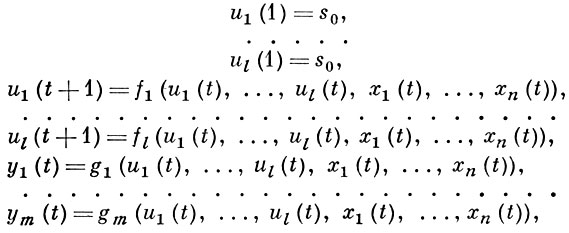
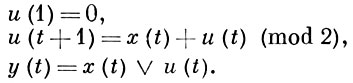
где t = 1, 2,... - целочисленный параметр, s0 ∈ S, а функции fi, i = 1, ..., l, gi, i = 1, ..., m и переменные хr, r = 1, ..., n, принимают значения из множества А. Этой системе соответствует канонич. схема, в к-рой все элементы памяти совпадают: i = 〈 А, S, В, φ, ψ, s0 〉, где A = S = B, i = 1, ..., l; φ (a, a') = a', ψ (a, a') = a. Функционирование автомата i содержательно может быть описано следующим образом. Пусть в момент времени t входу i приписана буква a(t), тогда эта же буква будет приписана выходу i в момент t + 1. На рис. 6 представлен автомат , канонич. уравнения к-рого имеют вид:
В общем случае описание структурных автоматов связано с заданием набора элементарных автоматов и нек-рого класса «правильно устроенных» схем (сетей), причем последние обычно определяются индуктивно.
Лит. : [1] Автоматы. Сб. статей, пер. с англ., М., 1956; [2] Глушков В. М., Синтез цифровых автоматов, М., 1962.
В. А. Буевич, С. В. Алешин.
Источники:
- Математическая Энциклопедия. Т. 1 (А - Г). Ред. коллегия: И. М. Виноградов (глав ред) [и др.] - М., «Советская Энциклопедия», 1977, 1152 стб. с илл.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://mathemlib.ru/ 'Математическая библиотека'