АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕОРИЯ
Расстановка ударений: АВТОМАТИ`ЧЕСКОГО УПРАВЛЕ`НИЯ ТЕО`РИЯ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕОРИЯ - наука о методах определения законов управления к.-л. объектами, допускающих реализацию с помощью технич. средств автоматики. Исторически сложилось так, что методы А. у. т. получили свое первое развитие применительно к процессам, встречающимся главным образом в технике (см. [1]). Напр., летящий самолет представляет собой объект, законы управления к-рым гарантируют его полет по требуемой траектории. Они реализуются с помощью совокупности измерительных приборов, преобразующих и исполнительных устройств, называемой автопилотом. Три причины лежат в основе этого развития: многие объекты управления были идентифицированы классиками науки (идентифицировать объект управления - значит написать его математик, модель, т. е. соотношения (1), (2), см. ниже); еще задолго до развития А. у. т., благодаря установлению ряда фундаментальных законов природы, существовал хорошо развитый математич. аппарат дифференциальных уравнений и особенно аппарат теории устойчивости движения (см. [2]); инженеры открыли закон обратной связи (см. ниже) и нашли средства его реализации.
Простейшие объекты управления описываются (векторным) обыкновенным дифференциальным уравнением
(1)
и неравенством
N(x, u, t) ≥ 0, (2)
где х{х1, ..., хn} - вектор состояния объекта, u{u1, ..., ur} - вектор управления, к-рый можно выбирать, t - время. Уравнение (1) есть математич. запись законов, к-рым подчинен объект управления; неравенство (2) - область его определения.
Пусть U есть к.-л. данный класс функций u(t) (напр., кусочно непрерывных), принимающих численное значение из (2). Любую функцию u(t) ∈ U назовем допустимым управлением. Уравнение (1) наз. математической моделью объекта управления, если:
1) указана область N(x, u, t) ≥ 0 определения функции f(x, u, t);
2) указан интервал времени  = [ti, tf ] (или [ti, tf), если tf = ∞), на к-ром наблюдается движение x(t);
= [ti, tf ] (или [ti, tf), если tf = ∞), на к-ром наблюдается движение x(t);
3) указан класс допустимых управлений;
4) область N ≥ 0 и функция f(x, u, t) таковы, что уравнение (1) имеет единственное решение, определенное при любом t ∈ , x0 ∈ N, каково бы ни было допустимое управление u(t). Далее всюду в (1) f(x, u, t) предполагается гладкой по всем аргументам.
Пусть xi = x(ti) - начальное, a xf = x(tf) - конечное состояния объекта управления. Состояние xf наз. целью управления. Существуют две главные задачи А. у. т. : задача программирования - определение управления u(t), при к-ром гарантируется достижение цели из xi ; определение закона обратной связи (см. ниже). Обе задачи разрешаются при условии полной управляемости объекта (1).
Объект (1) наз. полностью управляемым, если, каковы бы ни были xi, xf ∈ N, найдутся хотя бы одно допустимое управление u(t) и интервал при к-рых цель управления достижима. В противном случае говорят, что объект управляем неполностью. Поэтому возникает задача предварительного исследования: дана математич. модель (1), требуется установить критерий управляемости. В разрешении этой задачи достигнут (к 1977) незначительный прогресс. В случае, когда уравнение (1) линейно:
(3)
где А, В - стационарные матрицы, критерий полной управляемости формулируется так: для того чтобы система (3) была полностью управляема, необходимо и достаточно, чтобы ранг матрицы
Q = ||B, AB, A2 B, ..., An - 1 B|| (4)
был равен n. Матрица (4) наз. матрицей управляемости.
Если А, В - известные дифференцируемые функции от t, то матрица управляемости определяется так:
Q = ||L1 (t), L2 (t), ..., Ln (t)||, (5)
где 
В этом случае имеет место теорема: для того чтобы система (3) была полностью управляема, достаточно, чтобы существовала хотя бы одна точка t* ∈ , в к-рой ранг матрицы (5) равен n (см. [3]). Для нелинейных систем критерий управляемости пока (к 1977) не найден.
Первая главная задача А. у. т. заключается в выборе допустимого управления, при к-ром гарантируется достижение цели хf . Она имеет два способа решения. Первый из них состоит в проявлении воли главного конструктора (ГК) объекта (1) - назначение определенного вида движения, при к-ром цель хf достижима, и в подборе соответствующего управления. Такой способ решения задачи программирования применяется в практике во многих случаях. При другом способе ищется допустимое управление, минимизирующее заданную плату управления. Математич. формулировка задачи такова. Даны: математич. модель объекта управления (1), (2); граничные условия на вектор х, к-рые символически запишем в виде
(i, f) = 0; (6)
гладкая функция G(x, t) и плата за принятое управление
(7)
Задача программирования: среди допустимых управлений требуется найти такое, при к-ром условия (6) выполняются, а функционал (7) принимает минимальное значение. Необходимые условия минимума этой неклассической вариационной задачи доставляются следующей теоремой, носящей название «принцип максимума Л. С. Понтрягина» (см. [4]). Введем в рассмотрение вспомогательный вектор ψ {ψ1, ..., ψn} и вспомогательную скалярную функцию
H(ψ, х, u, t) = ψ ⋅ f(х, u, t). (8)
Функция H позволяет записать уравнение (1) и уравнение для вектора ψ в следующей форме:

(9)
Уравнение (9) является линейным и однородным относительно ψ, имеет единственное непрерывное решение, определенное при любых начальных условиях ψ (ti) и t ∈ . Вектор ψ наз. нулевым, если хотя бы одна из его компонент не обращается тождественно в нуль при t ∈ . Справедлива теорема: для того чтобы кривая х0, u0 доставляла сильный минимум функционалу (7), необходимо существование ненулевого непрерывного вектора ψ, определенного уравнением (9), при к-ром функция H(ψ, х, u, t) достигает максимума по u и выполняется условие трансверсальности

Пусть х0 (t, xi, xf), u0 (t, xi, xf) - решение, отвечающее задаче. Доказано, что в стационарной системе функция H(ψ0, х0, u0) удовлетворяет условию
H(ψ0, х0, u0) = C (10)
где С - постоянная, то есть (10) - ее первый интеграл. Решение u0, x0 наз. программой управления.
Пусть u0, x0 есть к.-л. (необязательно оптимальная) программа управления. Оказывается, что знание лишь одной программы управления недостаточно для достижения цели. Дело в том, что программа u0, x0, как правило, неустойчива относительно любых сколь угодно малых изменений в задаче, в частности наиболее важных изменений начальных значений (i, f), или, иными словами, эта задача некорректна. Особенность некорректности, однако, заключается в том, что она может быть исправлена средствами автоматич. стабилизации, основанными только лишь на использовании «принципа обратной связи». В связи с этим возникает другая главная задача управления - задача определения закона обратной связи.
Пусть y - вектор возмущенного движения системы, а ξ - вектор, характеризующий дополнительное отклонение органа управления, предназначенное для гашения возмущенного движения. Для реализации отклонения ξ должен быть заранее предусмотрен соответствующий ресурс управления. Возмущенное движение будет описываться уравнением

(11)
Здесь: А, В - известные матрицы, определенные на движении х0, u0, и суть известные функции времени; φ - нелинейные члены разложения функции f(x, u, t); f0 (t) - постоянно действующая возмущающая сила, происходящая либо от того, что программное движение не определено точно, либо от того, что при построении модели (1) не были учтены к.-л. дополнительные силы. Уравнение (11) определено в окрестности ||y|| ≤  , где , вообще говоря, достаточно малое, а в нек-рых случаях любое конечное положительное число или даже ∞.
, где , вообще говоря, достаточно малое, а в нек-рых случаях любое конечное положительное число или даже ∞.
Заметим, что полная управляемость системы (1), вообще говоря, не гарантирует полной управляемости системы (11).
Будем говорить, что объект управления (11) наблюдаем по координатам y1, ..., yr r ≤ n, если существует набор готовых к действию измерительных приборов, способных непрерывно производить измерения координат в любой момент времени t ∈ . Значение этого определения может быть проиллюстрировано примером управления продольным движением самолета. Хотя авиация существует более 50 лет, до сих пор нет прибора, измеряющего возмущение угла атаки крыла самолета или высоту его полета вблизи земли. Совокупность измеряемых координат назовем полем регулирования и обозначим через Р (y1, ..., yr), r ≤ n.
Рассмотрим совокупность допустимых управлений ξ, определенных над полем Р:
ξ = ξ (y1, ..., yr, t, p), r ≤ n, (12)
где р-векторный или матричный параметр. Будем говорить, что управление (12) представляет собой закон обратной связи, если операция замыкания [т. е. подстановка (12) в уравнение (11)] дает систему

= Аy + Вξ (y1, ..., yr, t, p) + φ (y, ξ (y1, ..., yr, t, p), t), (13)
невозмущенное движение к-рой у = 0 асимптотически устойчиво (см. Асимптотически устойчивое решение). Система (13) наз. асимптотически устойчивой, если ее невозмущенное движение y = 0 асимптотически устойчиво.
Существует два класса задач, к-рые могут быть сформулированы относительно замкнутой системы (13): класс задач анализа и класс задач синтеза.
Рассмотрим допустимое управление (12), заданное с точностью до выбора параметра р, напр.
Задача анализа: требуется определить область S значений параметра р, для к-рых замкнутая система (13) асимптотически устойчива. Построение области S осуществляется на основании методов, разработанных в теории устойчивости движения (см. Устойчивости теория) и нашедших широкое применение в А. у. т. В частности, отметим методы частотного анализа; методы, основанные: на Ляпунова теории устойчивости по первому приближению (теоремы Гурвица, Рауса и др.), на прямом методе Ляпунова построения v-функций, на теории Ляпунова-Пуанкаре построения периодич. решений, на методе гармонич. баланса, методе Б. В. Булгакова, методе А. А. Андронова, теории точечного преобразования поверхностей (см. [5]). Последняя группа методов дает возможность не только строить в пространстве Р области S, но также проанализировать параметры устойчивых периодич. решений уравнения (13), характеризующих автоколебательные движения системы (13). Все эти методы получили широкое применение в практике автоматич. управления, и их изучают в рамках различных специальностей в высшей школе (см. [5]).
Если S не пусто, то управление (12) наз. законом обратной связи, или законом регулирования. Его реализация, осуществленная с помощью совокупности измерительных приборов, усилителей, преобразователей и исполнительных устройств, наз. регулятором.
С задачей анализа тесно связана другая весьма важная для практики задача о построении границ области притяжения (см. [6], [7]). Рассмотрим систему (13), в к-рой p ∈ S. Множество значений y(ti) = y0, содержащее точку у = 0, для к-рых замкнутая система (13) сохраняет свойство асимптотич. устойчивости, наз. областью притяжения тривиального решения у = 0. Задача состоит в том, чтобы для данной замкнутой системы (13) и точки p ∈ S определить границы области притяжения.
Современная научная литература не содержит эффективных методов построения границ области притяжения, за исключением редких случаев, в к-рых удается построить неустойчивые периодич. решения замкнутых систем. Однако имеются нек-рые методы, позволяющие построить границы множества значений у0, целиком содержащегося в области притяжения. В большинстве случаев эти методы основаны на оценке области фазового пространства, в к-ром Ляпунова функция удовлетворяет условию v ≥ 0, v ≤ 0 (см. [7]).
Любое решение у (t, y0, р) замкнутой системы (13) представляет так наз. переходный процесс. В большинстве случаев практич. значения нельзя ограничиться решением лишь проблемы устойчивости. При разработке проекта предъявляются дополнительные, имеющие важное практич. значение, требования, при к-рых гарантируется наличие у переходного процесса нек-рых новых свойств. Характер требований и перечень свойств существенно связаны с физич. природой объекта управления. В задачах анализа обеспечение этих свойств переходного процесса, напр. заданного времени регулирования t*, в ряде случаев может быть достигнуто за счет выбора параметра р. Задача выбора параметра р носит назв. проблемы качества регулирования (см. [5]), и методы решения этой проблемы связаны с тем или иным построением оценок решений y(t, y0, р): либо фактич. интегрированием уравнения (13), либо нахождением оценки этих решений экспериментально, с помощью аналоговой или цифровой вычислительной машины.
Задачи анализа переходных процессов имеют много иных формулировок во всех случаях, в к-рых f0 (t) представляет собой случайную функцию, как, напр., в следящих системах (см. [5], [8]). Другие формулировки связаны с возможностью случайного изменения матриц А, В или даже функции φ (см. [5], [8]). В связи с этим развивались методы исследования случайных процессов, методы адаптации и обучения машин (см. [9]). Исследовались также переходные процессы в системах с запаздыванием и системах с распределенными параметрами (см. [10], [И]), в системах с переменной структурой (см. [12]).
Задача синтеза: дано уравнение (11), поле регулирования Р (y1, ..., yr), r ≤ n, и множество ξ (y1, ..., yr, t) допустимых управлений; требуется найти все множество М законов обратной связи (см. [13]). Одной из наиболее важных разновидностей этой задачи является задача о структуре минимальных полей. Поле Р (y1, ..., yr), r ≤ n, наз. минимальным полем, если на нем существует хотя бы один закон обратной связи и если размерность поля r минимальна. Задача состоит в том, чтобы для данного уравнения (11) и множества допустимых управлений определить структуру Р (yα1, ..., yαr) всех его минимальных полей. Поясним характер задачи на примере:
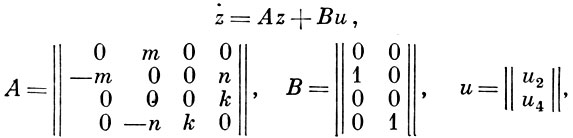
m, n, k - заданные числа. Допустимые управления - множество кусочно непрерывных функций u2, u4, принимающих свои значения из области

Минимальными полями в задаче являются либо поле P(z2), либо поле Р (z4). Размерность каждого поля равна единице и понизить ее нельзя (см. [13]).
Пока известен (1977) лишь один метод синтеза законов обратной связи, основанный на использовании функций Ляпунова (см. [13]). При этом существенную роль играет теорема Барбашина-Красовского (см. [6], [10], [15]): для того чтобы невозмущенное движение у = 0 замкнутой системы

(14)
было асимптотически устойчиво, достаточно существования знакоопределенной положительной функции v(y), полная производная к-рой, в силу уравнения (14), есть функция w(y), знакопостоянная отрицательная, однако такая, что на многообразии w(y) = 0 не лежат целые траектории системы (14), кроме у = 0. Задача выяснения существования и структуры минимальных полей имеет важное практич. значение, поскольку эти поля отвечают требованиям ГК о минимуме веса, габаритов, сложности, стоимости системы управления и ее максимальной надежности. Особый научный и практич. интерес эта задача приобретает для бесконечномерных систем, встречающихся в технике, биологии, медицине, экономике и социологии.
К сожалению, при проектировании систем управления невозможно ограничиться решением задачи синтеза законов обратной связи. В большинстве случаев требования ГК касаются обеспечения нек-рых важных специфич. свойств переходного процесса в замкнутой системе. Важность этих требований видна на примере регулирования атомного реактора. В случае, если переходный процесс затягивается долее 5 сек или максимальное уклонение к.-л. его координаты превосходит заданное значение, происходит атомный взрыв. В связи с этим возникают новые задачи синтеза законов регулирования, определенных на множестве М. Приведем формулировку одной из таких задач. Рассмотрим две сферы: ||y0 || = R, у0 = уi, ||y(ti)|| = ε, R ≥ ε - заданные числа. Обратимся к множеству М всех законов обратной связи. Возьмем любой из них и произведем замыкание, получим уравнение:
= Ау + Вξ (y1, ..., yr, t) + φ (у, ξ (y1, ..., yr, t), t). (15)
Рассмотрим все множество решений y(t, у0) уравнения (15), начинающихся на сфере R. Будем называть их R-решениями. Поскольку система (15) асимптотически устойчива для любого у0 на сфере, существует момент времени t1 при к-ром соблюдаются условия
||t1, y0 || = ε, ||y(t1, y0)|| < ε
при любом t > t1 .
Пусть
Из определения t1 ясно, что t* существует. Интервал t* - ti наз. временем регулирования (затухания переходного процесса) в замкнутой системе (15), если любое R-решение выходит на сферу ε при t1 ≤ t* и остается внутри ее при t < t1 . Очевидно, что время регулирования есть функционал вида t* = t* (R, ε, ξ). Пусть Т - заданное число. Возникает задача синтеза быстродействующих регуляторов: дано множество М законов обратной связи, требуется выделить такое его подмножество M1, на к-ром время регулирования в замкнутой системе удовлетворяет условию
t* - ti ≤ T.
Аналогично могут быть сформулированы задачи синтеза множеств М2, ..., Mk законов обратной связи, при к-рых соблюдаются другие k - 1 требований ГК,
Главная задача синтеза об удовлетворении всех требований ГК разрешима, если множества M1, ..., Mk имеют непустое пересечение (см. [13]).
Наиболее детально задача синтеза изучена для случая, в к-ром поле Р имеет максимальную размерность r = n, а показатель качества системы характеризуется функционалом
(16)
где w(y, ξ, t) - знакоопределенная положительная функция по у, ξ. В этом случае задача наз. задачей аналитического конструирования оптимальных регуляторов (см. [14]) и формулируется так. Даны уравнение (11), класс допустимых управлений ξ (y, t), определенных над полем Р (у) максимальной размерности, и функционал (16). Требуется найти управление ξ = ξ (y, t), при к-ром функционал (16) достигает минимального значения. Эта задача разрешается теоремой: если уравнение (11) таково, что можно найти знакоопределенную положительную допускающую бесконечно малый высший предел функцию v0 (y, t) и функцию ξ0 (y, t) такие, что выполняется равенство

(17)
и справедливо неравенство

при любых допустимых ξ, то функция ξ0 (у, t) разрешает задачу. При этом имеет место равенство

Функция v0 (y, t) наз. оптимальной функцией Ляпунова (см. [15]). Она служит решением уравнения (17) с частными производными типа Гамильтона-Якоби, удовлетворяющего условию v(y(∞), ∞) = 0. Методы эффективного решения такой задачи разработаны для случая, в к-ром функции w, φ допускают разложение в целые сходящиеся ряды по у, ξ с коэффициентами, являющимися непрерывными и ограниченными функциями от t. При этом принципиальное значение имеет разрешимость задачи по линейному приближению в уравнении (11) и оптимизации лишь интеграла от квадратичных членов, удерживаемых в разложении w. Разрешимость же последней задачи гарантируется соблюдением условия полной управляемости (см. [15]).
Лит. : [1] Максвелл Д. К., Вышнеградский И. А., Стодола А., Теория автоматического регулирования, М., 1949; [2] Четаев Н. Г., Устойчивость движения, 3 изд., М., 1965; [3] Красовский Н. Н., Теория управления движением, М., 1968; [4] Понтрягин Л. С. [и др.], Математическая теория оптимальных процессов, 2 изд., М., 1969; [5] Техническая кибернетика, кн. 1-2, М., 1967; [6] Барбашин Е. А., Введение в теорию устойчивости, М., 1967; [7] 3убов В. И., Математические методы исследования систем автоматического регулирования, Л., 1959; [8] Пугачев B. C., Теория случайных функций и ее применение к задачам автоматического управления, 3 изд., М., 1962; [9] Цыпкин Я. 3., Основы теории обучающихся систем, М., 1970; [10] Красовский Н. Н., Некоторые задачи теории устойчивости движения, М., 1959; [11] Бесекерский В. А., Попов Е. П., Теория систем автоматического регулирования, М., 1966; [12] Теория систем с переменной структурой, под ред. С. В. Емельянова, М., 1970; [13] Летов А. М., «Дифференц. уравнения», 1970, т. 6, № 4, с. 592-615; [14] его же, Динамика полета и управление, М., 1969; [15] Малкин И. Г., Теория устойчивости движения, 2 изд., М., 1966, (дополнение 4).
А. М. Летов.
Источники:
- Математическая Энциклопедия. Т. 1 (А - Г). Ред. коллегия: И. М. Виноградов (глав ред) [и др.] - М., «Советская Энциклопедия», 1977, 1152 стб. с илл.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://mathemlib.ru/ 'Математическая библиотека'